Published on: July 19, 2021
All of us have heard about radar systems, such as military radars used for detecting and tracking aircraft or ships, as well as weather radars that identify the type of precipitation such as rain, snow or hail, and determine its motion and intensity. Apart from these applications, radars can also be used for monitoring vehicle speed, human movement detection, heartbeat and respiration monitoring, and self-driving cars. In this blog, we will explain the basic principles of radar and learn how mmWave technology can improve the performance of radars.
What is radar, and how does it work? Radio Detection And Ranging (RADAR) is a detection and tracking system consisting of a transmitter (TX) and a receiver (RX) that are usually synchronized. Radars can be classified into pulse radar and continuous wave radar. In the former, the transmit antenna sends a pulse at any clock pulse, and in the latter, the radar operates with continuous wave (CW).

Figure 1. Different types of waveforms transmitted by radar. [1]
The TX sends the electromagnetic waves toward the desired target, and the RX receives the waves reflected off the target. The distance, speed, and angle of the target can be obtained by processing the received signal.
- Distance Measurement: Consider a pulse radar with a single antenna used for both transmission and reception that are isolated with a duplexer, meaning that the radar cannot receive and transmit simultaneously. This is the story: the radar transmits a pulse toward the desired target; the pulse is reflected off the target back towards the radar; therefore, the duration between the transmission and the reception of the pulse, called the round trip time (t), can be used to find the distance (d) between the radar and the target, according to the following equation [2]:
d = c × Δt/2
where c is the speed of light.
Note that the reflected signal corresponding to the first transmitted pulse should reach the RX before the transmission of the next pulse, that is the next clock pulse. Therefore, the time interval between two successive clock pulses determines the maximum distance or range that can be detected by the radar.
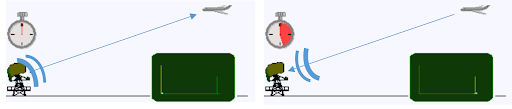
Figure 2. Pulse radar: The round-trip time of the pulse is measured. The distance is proportional to this time [3]
- Speed Measurement: Consider a target that is moving toward (or away from) the radar; the frequency of the received signal would experience a slight increase (reduction) due to the Doppler Effect, resulting in a phase shift of the received signal that can be detected using different techniques. Knowing the frequency of the transmitted signal, estimation of the target’s speed from the Doppler frequency shift is straightforward.
- Angle Measurement: Radar can detect the angle of the target by using directional receiver antennas which were pointed in various directions. One method is that the antenna is moved to produce a scanning beam [3]. Another way of steering is to use a phased array radar that can electronically point to different directions to detect the angle of the target.
As we know, there are always other objects such as the ground, sea, walls, or buildings in every environment that we are not interested in tracking. However, the radar receives the signals scattered from those undesired objects (called clutter) as well. Radar must filter out the unwanted signals to be able to detect and track the desired target. The good news is that, since these unwanted signals are reflected from static objects, the subsequent radar scans can easily identify them; these stationary reflections would be removed in the processing step, reducing the contribution of the clutter.
What are the motivations for using mmWave radar? mmWave radar operating between 30 GHz and 300 GHz, transmits signals with a short wavelength in the millimeter (mm) range. The advantages of operating at the mmWave spectrum are as follows [1]:
- Two close targets can be distinguished with a higher resolution. In other words, mmWave radar estimates the distances more accurately due to the wide range of available bandwidth at the mmWave spectrum.
- The directional nature of mmWave beams that is enhanced by beamforming, results in a very precise angular estimation.
- This directional orientation of the beams also reduces the clutter contribution.
- Millimeter-wave signals can penetrate through materials and sense them, so any change in the environment would be detected quickly.
- The required components and antenna arrays are very small and compact.

Figure 3. Automotive mmWave radar enables safer driving by sensing the environment [1]
Future of mmWave radar and use cases: As discussed above, mmWave radar estimates the distance, speed, and angle of the target with high resolution. This feature of mmWave radar meets the need for higher performance in sensing and positioning-based applications. Therefore, mmWave radar is a valuable sensor that can be used in automotive, industrial, and medical applications for various purposes such as intelligent and autonomous vehicles, people counting, building security, traffic monitoring, and heartbeat monitoring.
Needless to say, a lot is happening in the field of mmWave radar applications and we have yet more to learn. We hope this blog was able to provide insights into mmWave radar technology and help you understand the basic principles of radar systems.
If you were able to stick until the end and can’t wait for more content and you also want to know about us and our projects, you can always follow our social media channels.
References
[1] https://www.ti.com/sensors/mmwave-radar/overview.html.
[2] Iovescu, C., & Rao, S. (2017). “The fundamentals of millimeter wave sensors.“ Texas Instruments, 1-8.
[3] https://en.wikipedia.org/wiki/Radar.



